



| Recherche |
|
Effectuée par freefind.com |
| Nouveautés |
| Dernières Fiches |
Messerschmitt Bf 109 |
| Menu |
| Sous-Menu |
| Techniques Opérationnelles |
| Technologie Avion |
| Connaissances Générales |
| Un Avion a la Loupe global positionning system |
|||
| 1. Le système GPS (Global Positionning System) | |||
|
Le système GPS est un système de navigation mondiale utilisant une constellation de 24 satellites opérationnels à tout moment. Son étude, son financement et son entretien sont entièrement assurés par le Département de la Défense des Etats-Unis (DoD : Department of Defense). Lors de lélaboration du système dans les années 60, le but recherché était de pouvoir disposer dun système pouvant fournir en temps réel (ou différé, même si le temps réel était plus lapplication critique du moment), sans distinction de lieu ou de moment, les positions, temps et vitesse de tout mobile. Pour bien comprendre cela, il faut se replacer dans le contexte de lépoque, la guerre froide battait son plein et il était vital pour les Etats-Unis de pouvoir bombarder avec précision lURSS (bon jexagère à peine mais lidée est là) ! A lheure actuelle, il y a en fait deux systèmes GPS : le NAVSTAR (USA) et GLONASS (ex URSS, maintenant Fédération de Russie). Ces deux systèmes sont des systèmes de positionnement global mais pour 95% des gens, GPS est en fait synonyme de NAVSTAR. Le reste de ma description ne prend en compte que le système américain Pour décrire lensemble GPS, on décompose généralement le système en trois entités appelées segments. On compte le segment spatial, le segment contrôle et le segment utilisateur. |
|||
| 2. Les segments | |||
|
2.1. Le segment « spatial » Il est composé de 24 satellites opérationnels évoluant sur des orbites circulaires à une distance de lordre de 20200 km (10900 nm, miles nautiques, pas nanomètres) de la Terre. A cette altitude, la période de rotation (appelée aussi révolution) du satellite autour du globe est denviron 12 heures. Ce nombre important de satellites répond à la contrainte essentielle du système qui veut que, de nimporte quel point du globe et à nimporte quel moment, tout récepteur terrestre puisse être en vue dun minimum de 4 satellites (nous expliquerons la raison de cela par la suite mais pour faire court, le positionnement nest possible quavec au moins 4 satellites). Ces satellites assurent les fonctions suivantes :
2.2. Le segment « contrôle » Le segment de contrôle est constitué de 5 stations au sol. Elles sont localisées à différents endroits : Colorado Springs (Colorado, USA), Hawaï (Hawaï. USA), Ile dAscension (Océan Atlantique, GB, http://www.ascension-island.gov.ac/ascension.htm), Ile de Diego Garcia (Océan Indien, GB, http://www.dg.navy.mil/) et lile de Kwajalein (Iles Marshall, Océan Pacifique, http://www.smdc.army.mil/KMR.html). Ce segment est chargé de maintenir la totalité du segment spatial, il est donc sous contrôle direct du Département de la Défense des Etats-Unis. Pour cela, les stations suivent en permanence les satellites afin de déterminer précisément leurs trajectoires (appelées orbites ou éphémérides) ainsi que différents autres paramètres (savoir si le satellite a subi des pannes, sil faut envisager un remplacement, etc.). Cet éphéméride est ensuite transmis à chaque satellite qui le diffuse à tous les utilisateurs. Si ce segment considère quun satellite est momentanément ou définitivement inutilisable, il peut le désactiver par voie logicielle (léphéméride indiquera alors que le satellite portant tel numéro est désactivé). Léphéméride (almanach en anglais) est essentiel pour le fonctionnement des récepteurs puisquil permet de savoir quels sont les satellites qui sont au-dessus de nos têtes à linstant t, cela permet au récepteur de savoir ce quil doit « écouter ». 2.3. Le segment « utilisateur » Il représente lensemble des récepteurs des signaux GPS. Sommairement, ces récepteurs sont constitués dune antenne (chargée de recevoir le signal satellite et de lamplifier), dune partie électronique (chargée du traitement des signaux reçus) et dun contrôleur chargé de lapplicatif (navigation, enregistrement de points, ...). Tous ces éléments peuvent être plus ou moins intégrés dans un même support selon la technologie du constructeur et la vocation du produit. Cependant, dans certains cas de figures où la précision prime, ces récepteurs ne peuvent être envisagés sans compléments destinés à traiter les données acquises (logiciels de topographie, de cartographie, système de communication radio pour les applications en temps réel, ...). Principe de fonctionnement dun système GPS Pour être clair et concis à la fois voici comment fonctionne le GPS : 1. Le principe du positionnement via les satellites repose sur le principe de la triangulation (en gros, si vous savez vous situer par rapport à 3 points vous savez où vous êtes. 3 parce que chaque mesure donne un cercle or lintersection de deux cercles résulte en deux points distincts, si si). 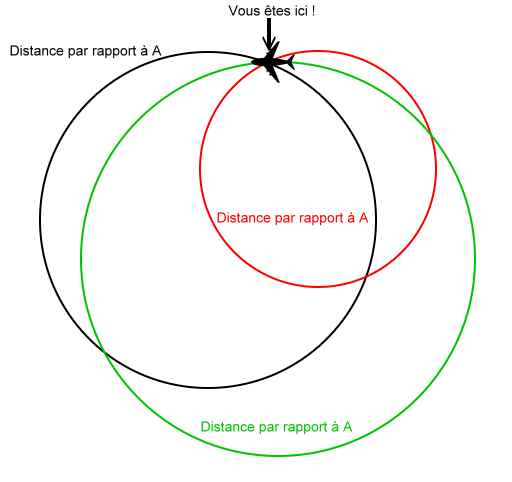 2. Pour trianguler sa position, le récepteur GPS évalue sa distance par rapport au satellite en mesurant le temps de trajet des ondes radio (on connaît la vitesse de propagation des ondes, laltitude des satellites - elle est fixe - et leurs positions dans le ciel via léphéméride. Donc en connaissant le temps du trajet, on connaît la distance parcourue par le signal, donc la distance entre le satellite et nous). 3. Pour mesurer le temps du trajet, le système GPS a besoin davoir un référentiel temporel extrêmement précis. Ce référentiel temporel est obtenu grâce aux horloges atomiques embarquées dans chaque satellite. 4. En plus des distances, pour calculer votre position, vous devez savoir exactement où sont les satellites sont dans lespace (ie léphéméride qui est diffusé en permanence par les satellites). 5. Enfin, il faut corriger les possibles retards que les signaux auraient pu prendre en traversant latmosphère (le passage de lionosphère « ralentit » le signal). Avec ces cinq points, il apparaît clair que la principale difficulté réside dans une source de temps stable puisque le temps est à la base de toutes les mesures (pour donner un ordre didée, une erreur dun millième de seconde donne une imprécision denviron 300 km). Les satellites et les récepteurs GPS créent ce qui est appelé un code pseudo-aléatoire ou Pseudo Random Code (PRC en anglais, vous lavez déjà sûrement deviné). Il est dit pseudo-aléatoire car il est si compliqué quil paraît aléatoire, alors quen fait, il nen est rien. La question qui se pose alors est pourquoi un telle complexité ? 1. On est sûr que les récepteurs ne capteront pas un mauvais signal par erreur (ie pour les amis militaires, lire difficile à brouiller : la puissance démission de chaque satellite est denviron 40 W, faiblard, donc le PRC permet de retrouver ses « petits » dans le bruit ambiant. On pourrait se dire quils auraient pu émettre « plus fort » mais la construction des satellites aurait alors coûté beaucoup plus cher. Qui plus est, le fait démettre un signal faible permet de noyer lémission dans le bruit ambiant : il est donc très difficile de le brouiller sélectivement puisque ça nest que du « bruit »). 2. Aucun autre signal ne pourra avoir les mêmes combinaisons. En effet, chaque satellite ayant son propre PRC, il apparaît sûr que les récepteurs ne se tromperont pas de satellites (cest-à-dire découter le satellite A en croyant écouter le B). Grâce à ce système, tous les satellites émettent sur la même fréquence sans interférer avec les émissions des autres. 3. Parce que cest grâce à ce PRC quon mesure le temps (lheure pas la météo). Pour bien comprendre lutilité du PRC dans la mesure du temps, nous allons faire une analogie avec une musique. En résumé, chaque satellite GPS « chante » une musique dans un ordre bien déterminé et chaque récepteur, connaissant la musique, la joue aussi (pour lui-même). Puisque les signaux GPS transmettent lheure avec une précision redoutable, en comparant le décalage entre les deux chansons, on obtient le temps de propagation de londe (donc la distance entre le récepteur et le satellite). Dans l'idéal, cest-à-dire si toutes les horloges des récepteurs GPS étaient parfaites (en fait pour quelles le soient, il faudrait qu'elles soient atomiques, doù un coût exorbitant), les mesures prises avec 3 satellites se croiseraient en un unique point (principe de la triangulation). Or, vu le coût dune horloge atomique (impensable de mettre ce genre de truc dans un récepteur à 152,45 Euro, 1000 FRF), il est impossible dobtenir une telle précision. Cest pourquoi chaque récepteur utilise au moins 4 satellites pour faire une mesure. En fait, la quatrième mesure résulte (souvent) en un résultat incorrect puisque les 4 mesures ne se croisent alors plus en un point unique. Grâce à (ou a cause de) cette erreur, le récepteur sait quil nest pas en phase avec le temps universel, celui émis par les satellites. En se recalant avec le temps universel grâce à une seule et même correction, appliquée sur tous les satellites, le récepteur retrouve le temps universel : les 4 mesures se croisent alors en un seul point ! Cest aussi grâce à cela que chaque récepteur GPS (un tant soit peu perfectionné) est capable de diffuser lheure avec une précision atomique (grosso-modo, plus ou moins une seconde en 30000 ans). Ceci nest quun bref aperçu des technologies employées pour utiliser un système GPS. En réalité, bien dautres points devaient être abordés pour expliquer la totalité du fonctionnement de la chaîne de mesure GPS (malheureusement, il y aurait de quoi remplir une bibliothèque). |
|||
| 3. LE GPS différentiel | |||
| Puisquau départ, le gouvernement américain avait décidé de limiter la précision du GPS pour les usages civils, il a fallu trouver un paliatif puisque une margeur derreur de 100 m (et maintenant 20) était bien trop importante pour beaucoup dapplications. Pour bien comprendre la suite, il est utile dexposer sommairement les notions de système de référence dans le cadre du GPS. Puisquune mesure GPS revient à chronométrer des temps de trajet dondes, il est évident que des équations complexes vont être employées (notamment celles relatives à la trajectoire du satellite et la propagation des signaux), il est donc nécessaire de se définir un référentiel mathématique. Au niveau du GPS, ce référentiel doit être universel. Cest-à-dire quen tous points du globe, il doit être valide. Ce référentiel mondial a été normalisé et sappelle WGS84 (ce qui signifie World Geodetic System 1984). Ce référentiel terrestre est repère orthonormé direct dont lorigine est le centre de la terre, le plan Oxy représente le plan de léquateur et le plan Oxz le méridien de Greenwich (cf illustration). 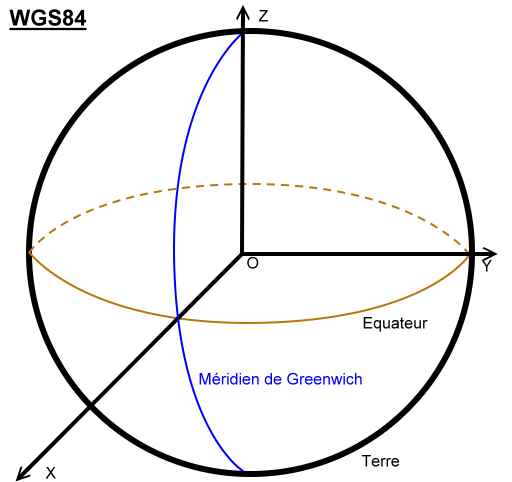 Dès lors toute mesure enregistrée par un système GPS est exprimée en utilisant le référentiel WGS84 (qui, il est vrai, est fort peu lisible pour une personne autre quun géodésien). La précision Au départ, tout le système GPS a été construit comme un système double avec comme objectif principal daider le positionnement des troupes US. De ce fait, il y avait deux types de services fournis : lun appelé PPS (Precise Positioning Service, applications militaires et utilisateurs « autorisés ») et lautre SPS (Standard Positioning Service, utilisateurs « lambda »). Il va sans dire que la précision offerte au public était assez ridicule eu regard des possibilités du système. Les coordonnées étaient données à 100 m près : le DoD (Departement of Defense) diffusait des erreurs dans le PRC (Pseudo Random Code) pour augmenter artificiellement limprécision (la procédure étant appelée SA, Selective Availability, vous aurez compris sans avoir besoin de traduction, AMHA). Le 1er Mai 2000 (qui nest pas, au passage, la fête du travail aux USA), le président américain (lami Bill Clinton) demanda au DoD de mettre fin au double standard. Depuis le 1er Mai 2000, minuit, la précision est dau moins 13 m (à 95% sur les axes horizontaux, latitude et longitude) et 22 m (à 95% sur laxe vertical, altitude). Au pire, la précision sera environ de 36 m (toujours à 95% en horizontal) et de 77 m (idem mais en altitude). Pour la topographie ou la cartographie, cette précision est insuffisante. Or, comme larmée américaine se réserve le droit à la précision, il a fallu trouver dautres moyens pour contourner le manque de précision : cest ainsi qua été créé le « GPS différentiel » (ou « Differential GPS », DGPS en anglais). Le principe est « deffectuer une localisation relative dun point par rapport à une référence connue ». Grâce à ce procédé, on obtient une précision de lordre du centimètre. Le principe, assez simple, est d'utiliser une référence, en plus du récepteur qui va servir à nous localiser. Cette référence est fixe et corrige les problèmes de précision et de transmission des signaux dans l'atmosphère (par exemple, la vélocité des ondes est variable en fonction des zones atmosphériques traversées plus tous les autres trucs à la con, littéralement, qui peuvent arriver pendant la mesure, cest du vécu, interférence, réflexion des ondes, obstruction du signal, etc). Puisque la référence est immobile (cest-à-dire que lon connaît avec précision ses coordonnées au niveau du globe), tout écart de position, dû à des erreurs de mesure, est enregistré pour usage ultérieur ou diffusé à dautres récepteurs pour leur informer des corrections à apporter pour compenser les dîtes erreurs. Avec un tel système, il est possible davoir une précision de lordre du centimètre (en 1998, jutilisais un système qui était précis à 2 cm près en Ox et Oy, horizontal, et 3cm en Oz, vertical). |
|||
| 4. Références | |||
| Aussi étrange que cela puisse paraître, il ny a pas vraiment de site officiel pour le GPS. Néanmoins, pour les applications civils, le site web des gardes-côtes américains est un des points dentrée possibles, http://www.navcen.uscg.gov, on y trouve entre autres lexcellent document http://www.navcen.uscg.gov/gps/geninfo/2001SPSPerformanceStandardFINAL.pdf. http://www.usno.navy.mil, Observatoire US Glossaire: http://www.gpsworld.com/resources/glossary.htm http://joe.mehaffey.com qui regorge de liens sur le GPS pour les applications civiles (mais cest un beau fouillis) http://liftoff.msfc.nasa.gov/realtime/jtrack/3d/JTrack3d.html pour voir où sont les satellites dans le ciel. En bref, votre meilleur chance est de fouiller le web avec votre moteur de recherche préféré. http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html, un bon site avec pleins dexplications. | |||
Rédacteur : Mathieu Chouquet-Stringer |
|||
faq-fra.aviatechno.net © 2001-2026